Features / Setup:
- Brushless flywheels
- Gearbox Pusher with front and rear switches
- Select Fire – Auto, Burst, Semi, Safe
- Narfduino Console (3-button ) – PFC8575 Shift Register
- Ammo Counter
- Single-stage fire trigger
- Adjustable ROF / FPS
- Instant-response pusher control
- 2 Profiles
- Fully re-mappable buttons
- Low-power cut-out
- Jam detection
- 3s only (as the default gearbox uses a motor that doesn’t respond well to 4s)
- Hold trigger on startup to reset settings
Typical Blasters
- FDL 3
- Similar gearbox based blasters with dual pusher switches and mag switch
Parts required
- FDL 3 components with modified magwell and gearbox mount parts for mag switch.
- Additional pusher switch for mag sensor
- Generic spring for mag sensor (I used a Retaliator lock spring)
- Or other blaster body with relevant parts
- BLHeli_32 ESC’s
- Narfduino Console – 3-button
- Narfduino (if using alternate hardware, ensure you update the dead time to match your mosfets – the timing is specific and measured in nanoseconds)
- ESC split cable
- Connectors for power / pusher motor (JST fits in the wiring channels fine)
Caveats
- Modified FDL models are subject to a non-commercial license per Project FDL regardless of any license you may hold with Blasters By Airzone models.
- The firmware allows you to adjust the spin-up and spin-down times of the motor. While you can set the spin-down time to 0 for instant braking, it is likely you will melt something.
- Changing the pin assignments will be a real headache.
Wiring Diagram
- Console SDA to Narfduino A4 (SDA)
- Console SCL to Narfduino A5 (SCL)
- Console INT to Narfduino A3
- Console +5v / Gnd to Narfduino +5v / Gnd
- Trigger to D6
- Mag Switch to D7
- Pusher – Front Switch to D2
- Pusher – Rear Switch to D3
- ESC / BLHeli_32 to D9 (use a splitter cable in the front cowling)
Source Code
[wpdm_package id=’3589′]
Source Code Tweaks
Logo Change
Open Logo.h in Arduino and swap between LOGO_KITTY and LOGO_WOODY
You can create your own using a vertically oriented LCD bitmap in 128×64 resolution.
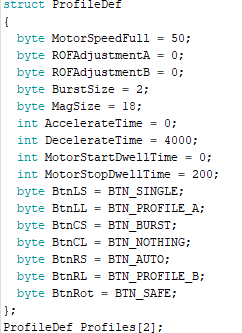
Default Options
Navigate to the below code and change the settings.
MotorSpeedFull = 30-100
ROFAdjustmentA & B (Auto & Burst) = 0 – 150 in 15 increments; 0 = max
AccelerateTime / DecelerateTime = 0 – 32768 milliseconds. Impacts the rate of change of the motors.
MotorStartDwellTime / Stop = 0 – 32768 milliseconds. Impacts the dwell time prior and post firing cycle